
It has been a long time since I published my last article.
I was too busy with my 9th grade exams and then preparing for the APs and some competitions.
I have good news to share , EcoDRIFTER has been shortlisted as a finalist for many national and international projects.
This has encouraged me to advance my work and confirmed my belief in my idea.
Talking about the biggest improvement is the attempt to make the device autonomous.
I want to free up the Jawaharlal Nehru canal staff from the burden of collecting plastic bags, so I wanted to make it autonomous.
To make the EcoDrifter autonomous, I had to add a controller computer, which has a camera to see trash and guide it. The natural choice for that is the Raspberry Pi, which is a small pocket size computer. It is roughly one fifth of the power of an Intel i5 PC. The Raspberry Pi has a very rich ecosystem which supports programming, and add-on hardware such as the IMX 269 camera sensor. So in order for the Raspberry Pi to analyze images, I used a model called YOLO version 8. It is the leading model designed for use with Raspberry Pi – it uses the camera module to interpret where the Eco Drifter is and where the plastic trash in the water to decide its path.
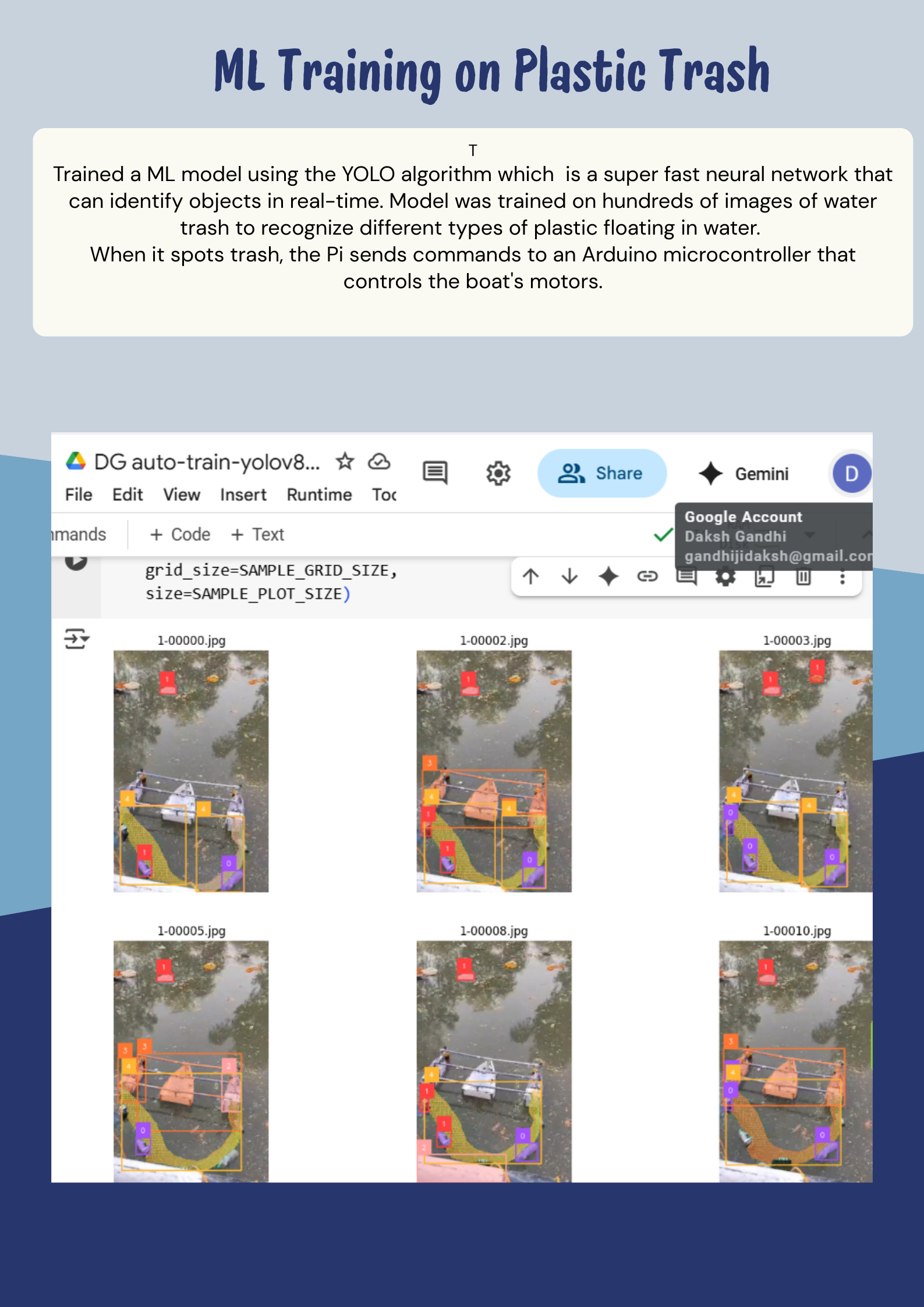
But first, the YOLO needs to be trained. It needs to learn what plastic trash or what a boat looks like and then store all such complex mathematical patterns. However, because the Raspberry Pi is a small pocket size battery device, likely, the training process can take a day or two to train on a couple of hundred images. Further, creating 200 such labeled images with plastic trash and boat neatly labeled itself takes a full day.

This is a sample set of images and how I trained my model, the actual data was much bigger though.
Fortunately, there is a way around this. Roboflow is an American company, which is a leader in automatic labeling of images & training models. They publish a tool about Auto distill, whose process and code is nicely documented on Google COLAB, which is a free virtual Python machine learning environment for non-commercial users like students. So, using Google collab and their pre-written code, in just two hours, I was able to train YOLO with over 200 images of water trash and the moving boat and load it on the Raspberry Pi.
You might think, why did I use Google COLAB or roboflow autodistill?
In order to make YOLO v8 accurate, I needed to give it very detailed training data. But drawing a polygon around every trash and labeling it in every image is a very slow process. On the other hand, using Google COLAB, I was able to minutely label a few dozen photos in a minute.
All other tools were paid and meant for large companies and were not as easy to follow.
Finally when I took my device for real life testing again in Jawahar canal, I mounted the Raspberry Pi camera module on a railing, the module took pictures and sent it to arduino controller which moved in the direction of the trash, after every movement a new image would be taken and signal would be sent to the arduino uno and the device would move accordingly.

The next step of improvements that I have planned on this device are
- Make the model completely autonomous , train the algorithm better
- Make EcoDRIFTER battery free and use solar panels
More on that soon.
I am happy to share that I have got an opportunity to present EcoDRIFTER at the Stockholm Junior Water Prize at IIT Madras. https://sjwpindia.in/




Leave a Reply